Contents
Distributed Predictive Control
- What's DMPC?
- Advantages & Problems
- Materials FYI
Distributed MHE
- What's DMHE?
- Advantages & Problems
Distributed Model Predictive Control
What's Distributed Model Predictive Control?
 There is a class of systems which is composed of many physically or geographically divided
subsystems (or units). These subsystems interact with each other by energy, mass or control objectives, and compose a physical network.
If each subsystem (or unit) was controlled by an individual controller, and these controllers communicated and coordinated with each other
by information network, we call this control system as distributed control system.
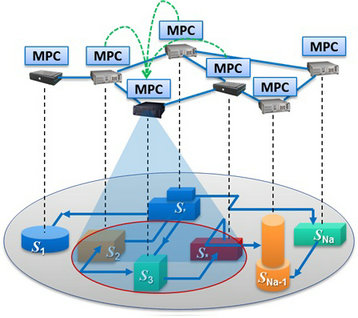
Furthermore, if MPC was running in the subsystem-based controller, we call this framework as distributed Model Predictive Control (DMPC).
In another words, the DMPC is a method which uses several (or a lot) MPCs to control a physical network (or a plant) and there are feed forward signals among these MPCs.
There is a class of systems which is composed of many physically or geographically divided
subsystems (or units). These subsystems interact with each other by energy, mass or control objectives, and compose a physical network.
If each subsystem (or unit) was controlled by an individual controller, and these controllers communicated and coordinated with each other
by information network, we call this control system as distributed control system.
Furthermore, if MPC was running in the subsystem-based controller, we call this framework as distributed Model Predictive Control (DMPC).
In another words, the DMPC is a method which uses several (or a lot) MPCs to control a physical network (or a plant) and there are feed forward signals among these MPCs.
Advantages and Problems
The advantages of DMPC is that it has a good flexibility, error tolerance, it could explicitly handle constraints, and it is easy to implement. However, the performance of closed-loop system using DMPC, in many cases, is still not as good as that using centralized MPC. Thus, how to improve the performance of entire closed-loop system is a key problem in DMPC field . especially when global information is prohibited (the communication burden becomes larger with the increasing the scale of system). In addition, theoretically, how to design a stabilized DMPC for a system with strong physical coupling is still an open problem.
Research Works
To solve these problems, we proposed some methods. e.g.
- Impacted region cost optimization based DMPC: each subsystem based MPC optimizes not only it own subsystem's cost function based also that it impacted on to improve the entire closed-loop system performance, and communicated with the optimized subsystem's upstream subsystem's controllers. It should be notice that the impacted range can be redefined according to the performance, communication, and implementation requirements. Extremely, if define the impacted region as itself, the ICO-DMPC become the basic DMPC, and if define the impacted region as entire system, the ICO-DMPC becomes the Cooperative DMPC. Details refer to [IEEE TASE 2015].
- Sensitivity function based ICO-DMPC: can increase the coordination degree without any increasing of network connectivity. It means the flexibility of distributed framework is not destroyed. Details refer to [自动化学报 2013], and [BookChp 2015]
- N-step ICO-DMPC: can decrease the network connectivity and communication burden without any decreasing of entire closed-loop system's optimization performance. Details refer to [Adchem 2015]
Materials for Your Reference
- Matlab simulation codes for Accelerated Cooling Process (download)
- Keynote speech Power point slides in CCPC2015: "DMPC coordination strategy and structure analysis" (download)
Distributed Moving Horizon Estimation
What's Distributed Moving Horizon Estimation?
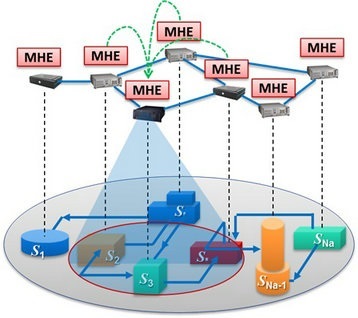 Similarly with the Distributed Model Predictive control, the Distributed Moving Horizon Estimation is a method which uses several (or a lot) Moving Horizon Estimation (MHE) algorithms to estimate a physical network (or a plant)'s states and there are feed forward signals among these MHEs.
Similarly with the Distributed Model Predictive control, the Distributed Moving Horizon Estimation is a method which uses several (or a lot) Moving Horizon Estimation (MHE) algorithms to estimate a physical network (or a plant)'s states and there are feed forward signals among these MHEs.
Advantages and Probems
Good flexibility, error tolerance, handling constraints, and easy to implement are the advantages of Distributed MHE. How to deal with the arrival residual and how to improve the estimation performance are the two of the most important problems in the researching of DHME